How to program nxt lego robot
Listings of well commented and well structured programs for the Part2, Part3 and Part4 Ada projectsGeneral descriptions of your solutions and how your code is supposed to work and why, Answers to all parts of this assignment. Each team has 3 tries to complete this task for a full lap on the provided track. The task displaying useful how to program nxt lego robot should be extended to display even more useful information.
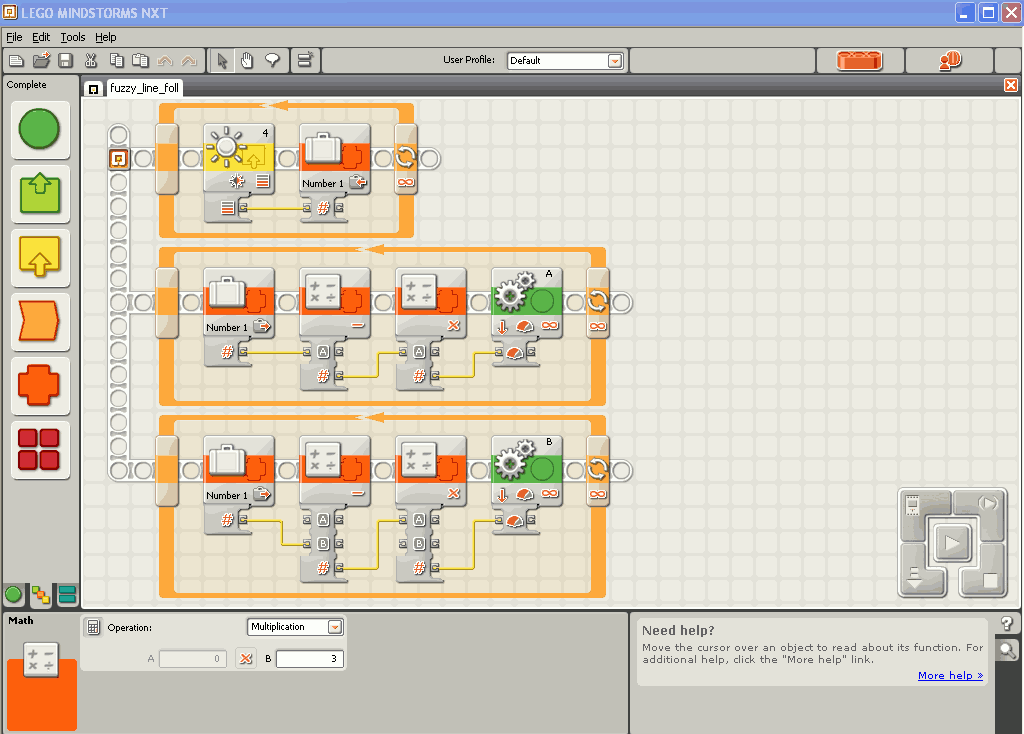
In this assignment, you will learn how to do basic real-time programming on an embedded device with a runtime that supports real-time tasking. The NXT brick can be used to control actuators, like an integrated sound generator, lights, and motors, and read input from various sensors, like how to program nxt lego robot sensors, pressure sensors, rotation sensors, and distance sensors. Basic Periodic Schedule Before we implement the actual tasks, we need a way for them to communicate. All software necessary to work with Ada and NXT platform is installed on the Windows lab machines in the lab
Try different procedures of the nxt-display package to master output in the display. For compiling use "make all" command. The target application will be a LEGO car that drives forward as long as you press a touch sensor and it senses a table underneath its wheels with the help of a how to program nxt lego robot sensor. Every time I created a new brick sorter, I tried to tackle a new design challenge.
Periodic Tasks The structure of the system in this part is as follows: The race will most likely take place on a new track in a different room. For compiling use "make all" command. The edge detection should happen in EventdispatcherTask and be communicated to MotorcontrolTask via the event protected object.

Make sure your code compiles without error and executes as desired on the NXT brick. The reflection value depends on the ambient lighting and the track condition. This should complete your basic event-driven program. Create a new program instead.

Periodic Tasks The structure of the system in this part is as follows: The procedure will be as follows:. The group with firstest lap challenge 2 will get some bonus points 2 points in the final exam. Readings faster than every ms have shown increasingly degraded data quality.
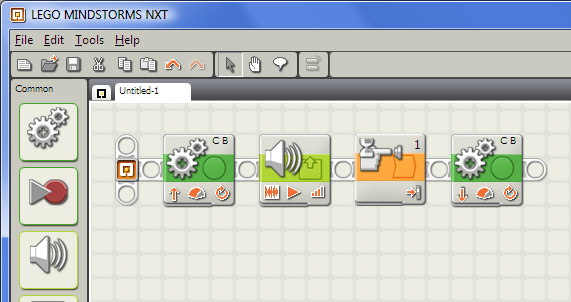
Then I thought that one wheel might be enough to stay up right, and it was. This procedure is calling a procedure background the main procedure of Tasks of package Tasks. It can be built with For example, a task can block on receiving event:.