Fast line tracer robot nxt programming language
The digital interface is capable of both I 2 C and RS communication. Lego Mindstorms NXT 2. The set contains pieces, including a new sensor that can detect colors. Parts can be ordered separately. In the original kit, the sensors included are the color sensor, two touch sensors, and an ultrasonic sensor:.
In order to create larger, more complex programs, programming software on a PC is required. The standard programming software is NXT-G, which is included in the package.
Third-party programming software is also available, some of which is listed below:. NXT-G is the programming software included in the standard base kit. It features an interactive drag-and-drop environment. Since its release, several bugs have been found and new sensors have been created. While the toolkit does allow for the creation of new sensors, National Instruments has yet to formally release an update.
It requires nxtOSEK to run. RoboMind is an educational programming environment that offers a concise scripting language for programming a simulated robot. These internationalized scripts can, however, also directly be exported to Lego Mindstorms robots. It also has a component architecture UObject for distributed computation. Unlike the other languages for the NXT the code isn't compiled to a binary file. This method of execution is significantly slower than executing compiled code directly.
From Wikipedia, the free encyclopedia. For other uses, see Mindstorm disambiguation. This article may contain too much repetition or redundant language. Please help improve it by merging similar text or removing repeated statements. Lego portal Robotics portal. Archived from the original on 6 October Sample Project on coding4fun.
Archived from the original on Board games Serious Play. It will respond immediately. The latest version can be always obtained from the GitHub page of this project. You can obtain Windows installer for the latest version here. An example program in nxtIDE, written in Python click to enlarge.
Line follower robot in the simulator click to enlarge. Quick tutorial Here are three simple tutorials to show you what it is like to program robots with nxtIDE: Simple movements Light sensor Distance sensor Screencast. Console If you want to open the console, click at the topright image in nxtemu. What can I do with it? Where can I get it? Set output to speed and force a motor connected to it to move backward.
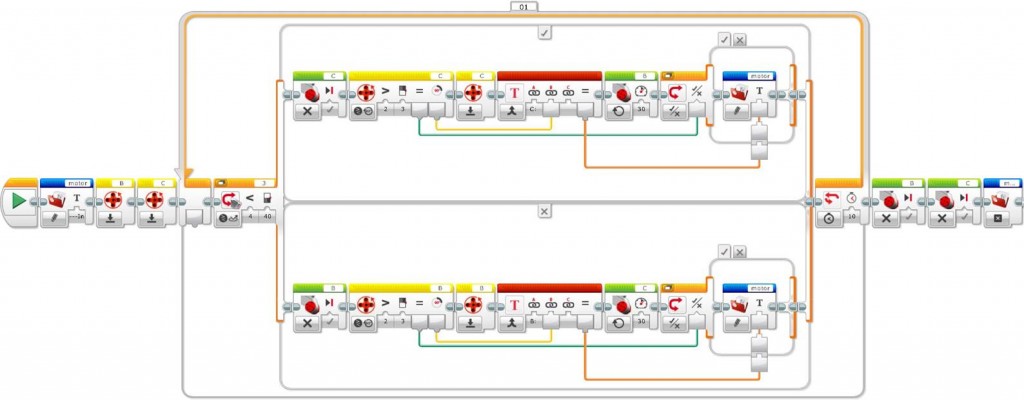
The program consists of three loops that run at the same time. The first loop reads the current reflected light value and stores it in the variable called "Number 1". The second and third loop control the left and right motors. The reflected light sensor gives a value between 0 and A typical value for a black surface is around 20 and for a white surface something around These values depend of on the ambient right conditions and the distance of the sensor from the surface.
The motor power itself as well is a value between 0 and